Wyobraźmy sobie 40 tonowy pojazd ciężarowy o 5 osiach, poruszający się z prędkością 100 km/h. Czy da się zmierzyć masę takiego pojazdu bez zatrzymywania? Przecież, to tak jakby przebiegając przez wagę łazienkową oczekiwać poprawnego wyniku pomiaru… A jednak da się to zrobić! Systemy, które to umożliwiają nazywają się Weigh-in-Motion.
Systemy Weigh-in-Motion (WIM), czyli dynamiczne wagi pojazdów samochodowych, są systemami pomiarowymi, które służą do pomiaru nacisków osi oraz masy całkowitej pojazdów bez konieczności ich zatrzymywania. Czujniki pomiarowe takich systemów są montowane w nawierzchni drogi w taki sposób, że kierowca nie jest świadomy odbywającej się kontroli. Dzięki temu, pomiarowi podlega każdy pojazd poruszający się daną drogą, a rozwiązanie takie zapewnia 100% efektywność. Pozwala to na skuteczną eliminację z ruchu pojazdów przeciążonych, wyrządzających największe szkody nawierzchni.
Ważenie pojazdów w ruchu – o co tu chodzi?
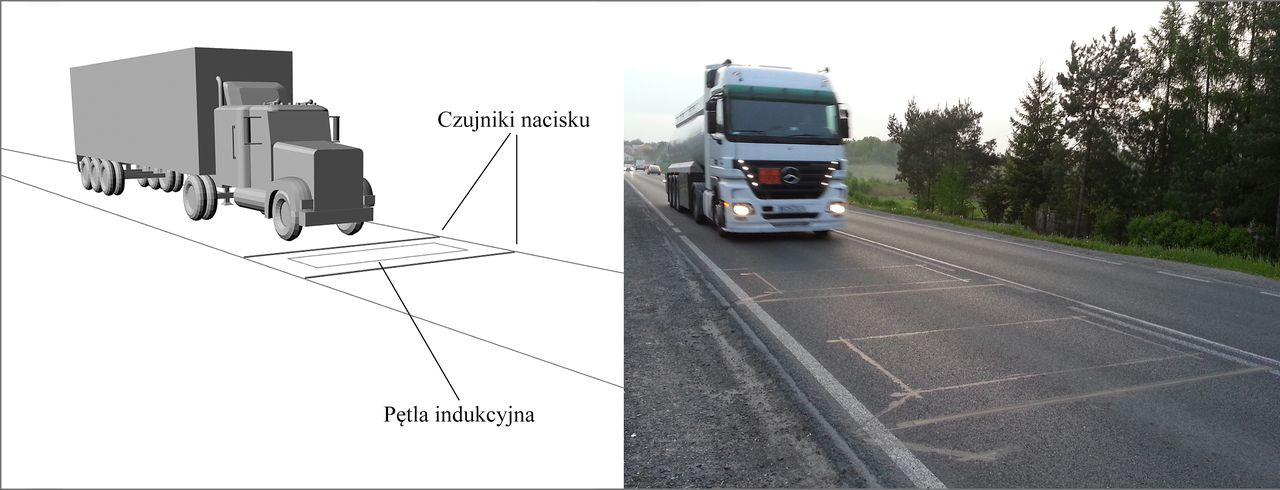
Dynamiczne wagi pojazdów w ruchu (WIM) umożliwiają pomiar nacisków osi oraz masy całkowitej pojazdu, który porusza się z prędkością z zakresu 10 – 120 km/h. Czujniki pomiarowe takich wag są montowane w nawierzchni, prostopadle do kierunki ruchu pojazdów. Kolejno przetaczające się po czujnikach koła, wywierają mierzalny nacisk, generując sygnały pomiarowe. Takie rozwiązanie w stosunku do metod klasycznych, wymagających zatrzymania pojazdu kontrolowanego na poboczu drogi, ma trzy zasadnicze zalety:
- dużą efektywność, gdyż pomiarowi podlega każdy pojazd poruszy się danym odcinkiem drogi,
- czas pomiaru jest znikomo mały,
- koszty kontroli są niskie.
Czujniki pomiarowe
Podstawowym elementem systemów WIM są czujniki nacisku kół lub osi pojazdów. W zależności od konstrukcji są one montowane pod nawierzchnią drogi (w asfalcie), lub równo z nawierzchnią drogi (koło ma bezpośredni kontakt z czujnikiem). Ponieważ czujniki są kluczowym elementem całego systemu pomiarowego, od ich właściwości w dużej mierze zależą właściwości całego systemu ważącego. Do najpopularniejszych czujników nacisku kół lub osi pojazdów należy zaliczyć czujniki: kwarcowe, płytowe – tensometryczne, pojemnościowe oraz polimerowe.
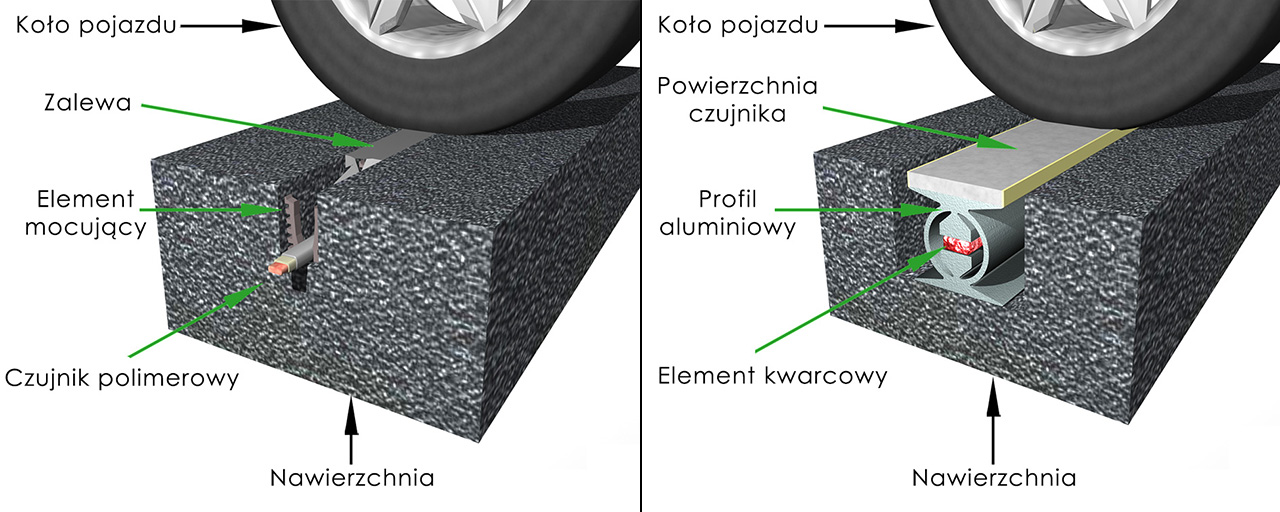
W czujnikach polimerowych i kwarcowych wykorzystane jest zjawisko piezoelektryczne – generacji ładunku elektrycznego pod wpływem naprężeń piezoelektryka. Czujniki płytowe z kolei są najbardziej zbliżone konstrukcją do klasycznych wag, gdyż do ich konstrukcji używa się tensometrów. Przy prędkości 70 km/h, kontakt opony z czujnikiem trwa kilka milisekund. W tym czasie należy wykonać pomiar i na jego podstawie oszacować nacisk koła na podłoże.
Struktura systemów WIM
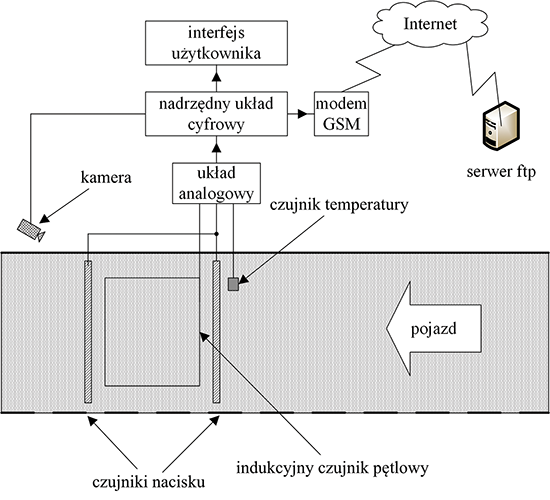
W typowych konstrukcjach systemów dynamicznego ważenia pojazdów WIM, stosuje się dwa czujniki nacisku co umożliwia zebranie dwóch próbek dla każdej osi pojazdu, a wynik ważenia jest obliczany jako średnia arytmetyczna. Pozwala to ograniczyć niekorzystny wpływ składowej dynamicznej na wynik pomiaru. Suma tak obliczonych nacisków wszystkich osi pojazdu stanowi ocenę jego masy całkowitej. Oprócz czujników nacisku system jest wyposażony również w czujniki indukcyjne pętlowe, które pełnią rolę detektora obecności pojazdu na stanowisku oraz pozwalają na pomiar dodatkowych jego parametrów, takich jak: długość zastępcza, obecność przyczepy, itp.
Skład Zespołu ds. Administracyjnych Systemów WIM przy Klastrze Inteligentnych Systemów Transportowych
- AGH w Krakowie – Katedra Metrologii i Elektroniki – Lider Zespołu
- CAT Traffic
- Kapsch Telematic Servises sp. z o.o.
- Kistler Eastern Europe s.r.o.
- TRAX elektronik Sp. Jawna
Prof. Janusz Gajda, dr hab. inż Ryszard Sroka oraz dr inż. Piotr Burnos z Katedry Metrologii i Elektroniki (KMiE) AGH w Krakowie zainicjowali w 2013 roku powstanie w Polsce grupy, skupiającej wyższe uczelnie, urzędy administracji państwowej, instytuty badawcze oraz firmy komercyjne, której celem jest stworzenie warunków niezbędnych do stosowania systemów dynamicznego ważenia pojazdów Weigh-in-Motion (WIM) w celach administracyjnych (czyli do egzekwowania przepisów dotyczących dopuszczalnych nacisków na oś i masy całkowitej pojazdów).
Katedra Metrologii i Elektroniki AGH posiada kilkunastoletnie doświadczenie w zakresie konstrukcji systemów do pomiarów parametrów ruchu drogowego, w tym systemów WIM. Pracownicy Katedry są uznanymi ekspertami w środowisku międzynarodowym w zakresie systemów WIM oraz pionierami badań nad tymi systemami w Polsce. Skonstruowane w KMiE systemy powstały zarówno w ramach zrealizowanych projektów badawczych jak również na zamówienie podmiotów komercyjnych. Opracowania konstrukcyjne były wielokrotnie nagradzane na międzynarodowych targach i wystawach wynalazczości.
Systemy Weigh – in – Motion – dlaczego to takie ważne?
To chyba oczywiste. Niszczenie i degradacja infrastruktury drogowej oraz bezpieczeństwo ruchu zależy od bardzo wielu czynników i negatywnych zjawisk występujących w szeroko rozumianym transporcie. Należy do nich między innymi przeciążanie pojazdów. Konsekwencje tego zjawiska są różnorakie: od wpływu na dynamikę pojazdu, a więc długość drogi hamowania, sterowność, etc. po oddziaływanie na nawierzchnię drogi. Szczególnie istotne zagrożenie dla bezpieczeństwa ruchu stwarzają przeciążone pojazdy ciężarowe. Eksperci zgodnie przyznają, że pojazdy takie są głównym czynnikiem mającym wpływ na pogarszanie stanu dróg i mostów.
Ważenie pojazdów w ruchu pozawala na efektywną kontrolę wagi pojazdów oraz eliminację z ruchu tych, które przekraczają dopuszczalne normy.
Cel prac Zespołu ds. Administracyjnych Systemów WIM (ZAS-WIM)
Cel główny:
Wprowadzenie w Polsce administracyjnych systemów WIM.
Cele cząstkowe:
- Opracowanie procedury legalizacji i kontroli metrologicznej systemów WIM.
- Określenie wymagań konstrukcyjnych dla administracyjnych systemów WIM.
Nasza Propozycja dla Polski
Wszyscy znamy urządzenia nazywane fotoradarami, które służą do dyscyplinowania kierowców w zakresie przepisów prawa drogowego dotyczących ograniczenia prędkości. Podstawową zaletą tych urządzeń jest ich ciągła praca, niezależnie od pory dnia i warunków pogodowych. Warunkiem wykorzystania wyników pochodzących z fotoradarów w postępowaniu administracyjnym jest istnienie i przestrzeganie ściśle określonych procedur postępowania w zakresie ich metrologicznej legalizacji, dopuszczenia do używania i kontroli ich parametrów metrologicznych.
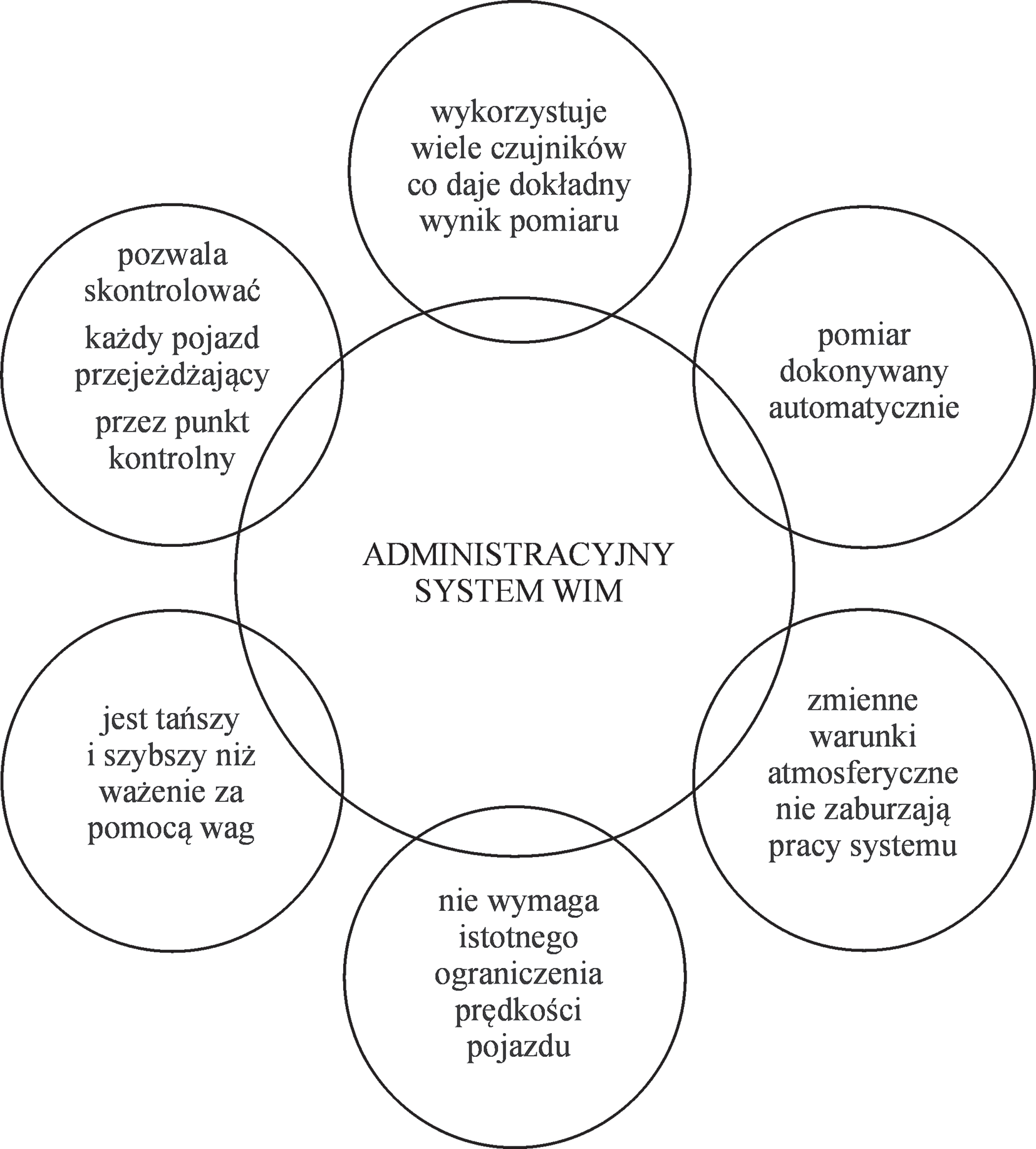
W przekonaniu członków Zespołu identyczną rolę ale w zakresie przestrzegania przez właścicieli pojazdów przepisów określających dopuszczalną masę całkowitą pojazdów oraz nacisków poszczególnych osi i grup osi, mogły by pełnić systemy WIM. Takie systemy nazywamy Administracyjnymi Systemami WIM. Warunek realizacji tego postulatu jest podobny: stworzenie szczegółowej procedury legalizacji i kontroli metrologicznej systemów WIM. Równocześnie jednak ze względu na bardzo dużą liczbę czynników wpływających na niepewność wyników ważenia uzyskiwanych z takich systemów (np. zmienne warunki atmosferyczne) konieczne jest również opracowanie wymagań konstrukcyjnych (wyposażenie systemu WIM w odpowiednią liczbę czujników nacisku oraz w możliwość pomiaru wszystkich istotnych czynników wpływowych) jakie powinny spełniać takie systemy.