Wstęp
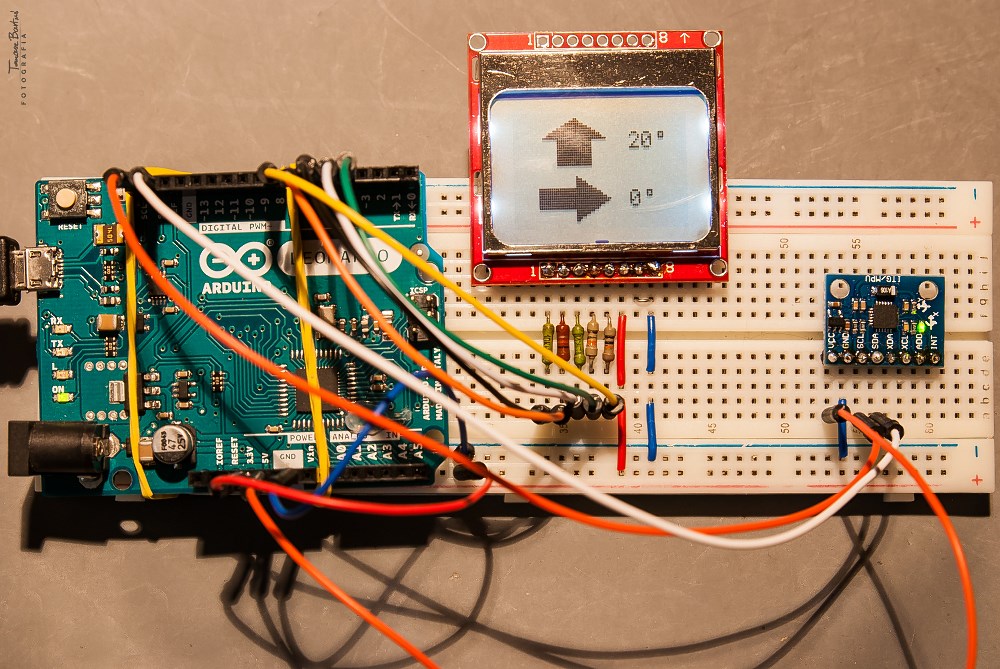
W projekcie Pomiar kątów za pomocą akcelerometra opisano zasadę działania akcelerometra z modułu GY-521 (MPU-6050). W poniższej realizacji wykonany zostanie prosty klinometr czyli przyrząd do pomiaru kątów pionowych w odniesieniu do płaszczyzny poziomej (Fig. 1).
Lista części
- platforma Arduino (tu Leonardo),
- płytka prototypowa,
- moduł GY-521 (akcelerometr i żyroskop MPU-6050),
- wyświetlacz LCD Nokia 5110,
- rezystory 10kΩ (5 szt.),
- przewody/mostki.
Zasada działania
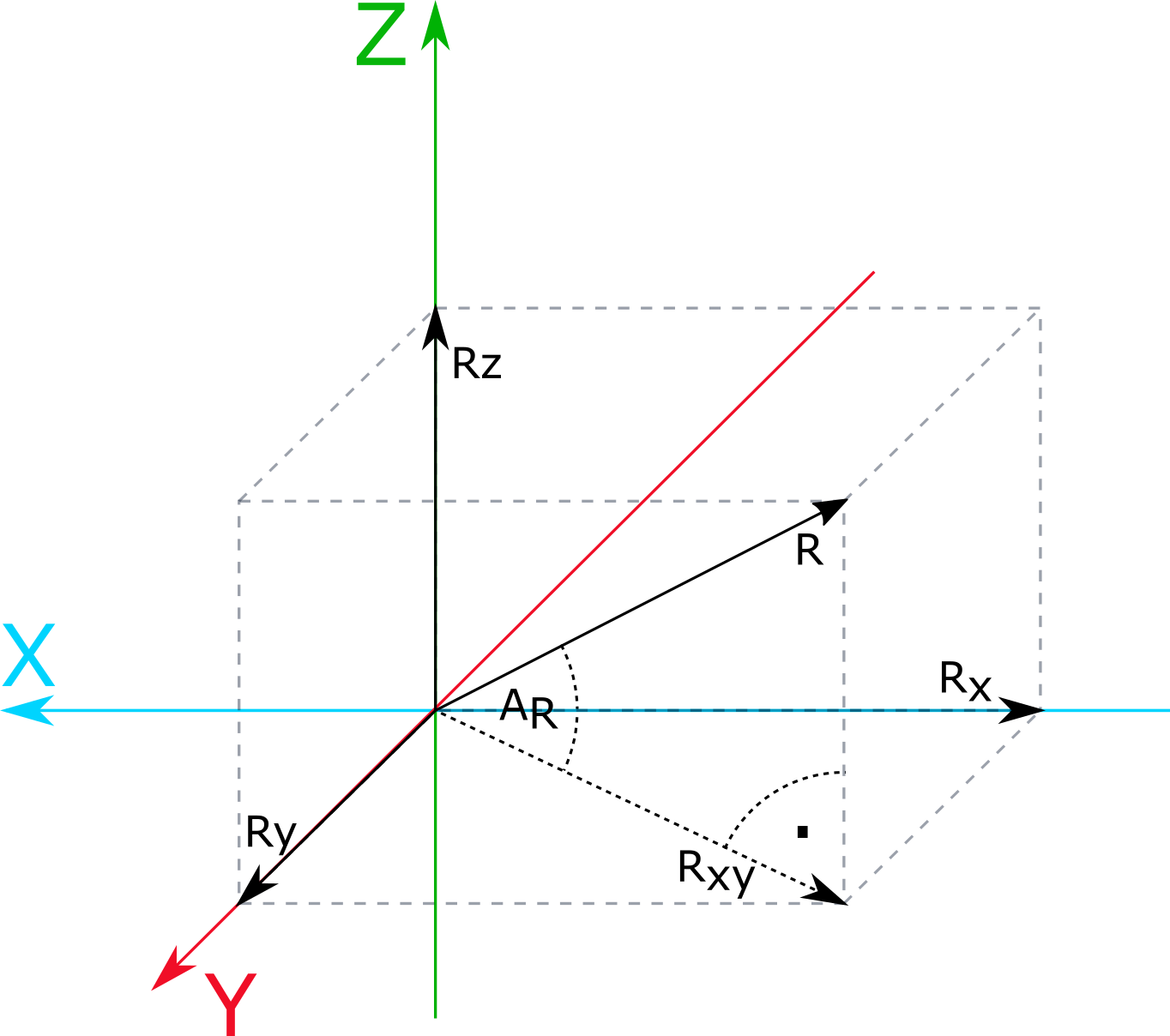
Przyjrzyjmy się sytuacji z Fig. 2. Wyobraźmy sobie, że R jest wektorem siły wypadkowej mierzonej przez akcelerometr. Jeżeli przyrząd będzie się znajdował w spoczynku, będzie to wektor siły grawitacji, jeśli jednak będzie się znajdował w ruchu, będzie to wypadkowa siły grawitacji i siły bezwładności. Rx, Ry i Rz stanowią projekcje wektora R na osie X, Y i Z. To właśnie te wartości (w przeliczeniu na jednostki bezwymiarowe) rejestruje akcelerometr MPU-6050.
Zauważmy, że zgodnie z prawem Pitagorasa dla układów 3D (Fig. 3):
d2 = a2 + z2,
a2 = x2 + y2,
dlatego:
d2 = x2 + y2 + z2,
Wracając do akcelerometru i pomiarów nachylenia wektora wypadkowego R (Fig. 2),
AR = (sin (z / sqrt(square(x) + square(y) + square(z))) / (pi/180);
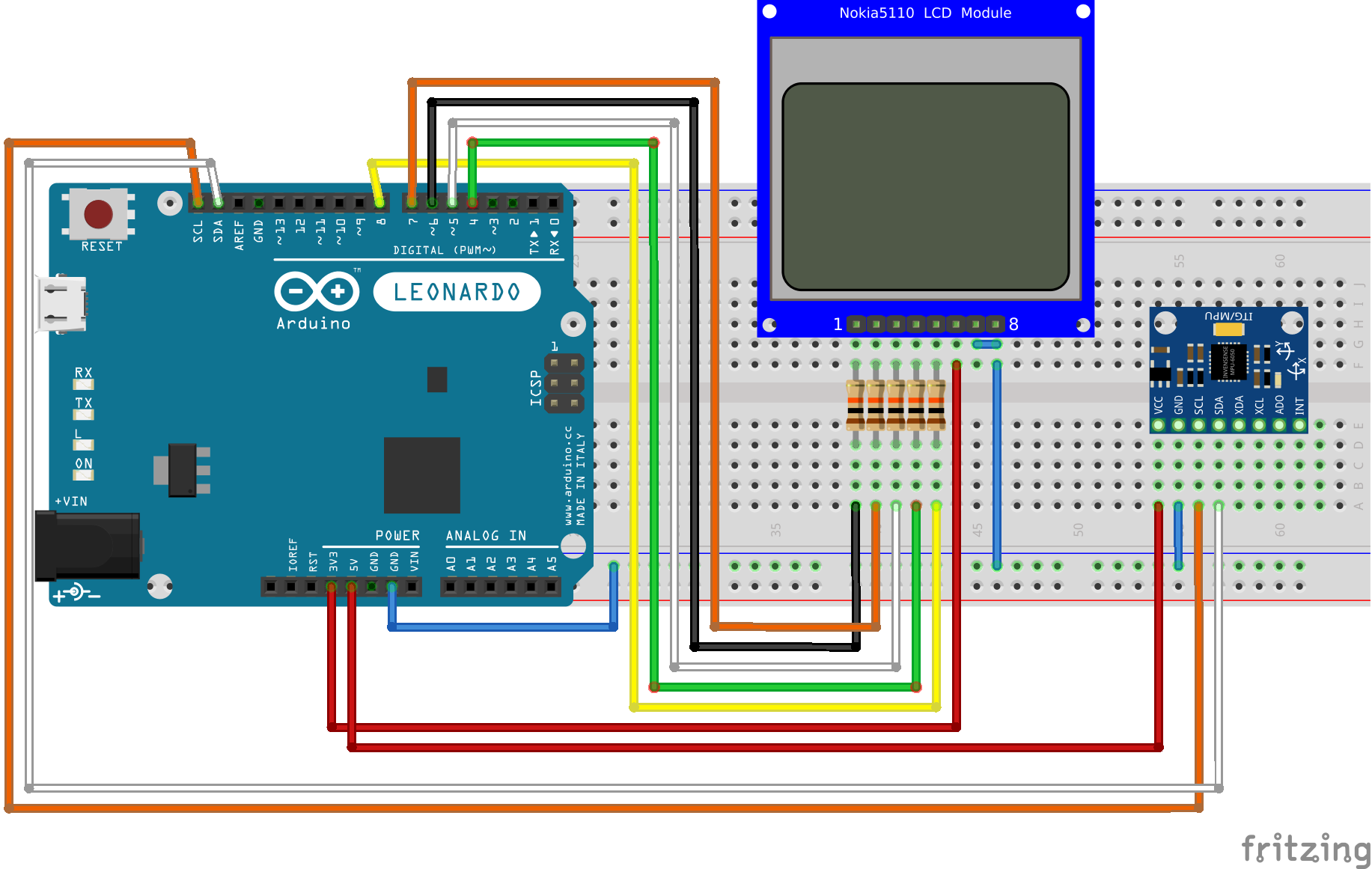
Schemat ideowy